Auto Pilots: Understanding the role in cockpit workload, safety and convenience.
By STEC/Cobham
- Introduction
- General Overview
- Features/Functions
- Workload
- Safety
- Old vs New
- Purchasing
- Flowchart
Introduction
Although autopilots are optional equipment for non-commercial aircraft, they can serve as a valuable and useful resource. The information within these tabs is intended to offer an objective overview of autopilot systems, and to explain how autopilots can reduce workload in the cockpit, increase safety in all flight environments, and enhance the enjoyment of flying. This page addresses the following information:
• Basic advantages of an autopilot
• A look at the two primary autopilot design architectures:
• Position-or Attitude-Based
• Rate-Based
• A comparison of today’s technologically advanced systems to those available in the past
• Decision-making considerations for purchasing an autopilot
General Overview
A Simple Definition and Description
An autopilot is an avionics system designed to serve two primary purposes:
• Enhance a pilot’s flight control capabilities
• Reduce cockpit workload by putting the airplane in an automatic flight mode
Basic Components
Mode Selector / Programmer: This device allows the pilot to program the autopilot function needed to accomplish an intended flight profile. The function could integrate the autopilot with other avionics components for the task at hand; i.e., a Navigation (NAV) radio which is defining an airway to be tracked.
Computer: The computer receives and interprets the information for a chosen function, together with any
additional data input from integrated avionics components. It then sends an appropriate signal to the system’s actuators.
Actuators: Also known as servos, actuators receive the computer’s signal and move the airplane’s control surfaces to achieve the necessary change in attitude and / or flight path.
Position-Based vs. Rate-Based Autopilots:
Autopilots are stabilized by signals from gyroscopes or sensors that emulate forms of gyroscopes. Of all the gyro instruments available, vertical gyros and inclined axis rate gyros are the most commonly used in the design of an autopilot. Thus the terms position-based and rate-based describe the autopilot system relative to the primary sensor type used in the stabilizing function. Here is a summary of the differences and advantages of each system.
Position-or Attitude-Based Systems: To gain a better understanding of position based autopilots, it is helpful to review the basics of a gyro. Vertical gyros, also known as displacement and attitude gyros, were first used for aircraft instrumentation in the U.S. around 1910 by Elmer A. Sperry. Vertical gyros provide a display that represents the attitude of the aircraft in roll and pitch relative to the earth’s surface.
The amount of change of this artificial attitude can be determined electronically. This produces a derived attitude command for pitch and roll that tells the autopilot how rapidly the attitude is changing. The autopilot then inputs the amount of position change to correct the error. Position or attitude autopilots typically use the pilot’s attitude indicator as a gyroscope signal source. This saves the expense of adding a dedicated gyro instrument. Position-based systems typically bank the aircraft at a preset maximum bank angle regardless of the aircraft’s speed. The angle would normally be either 20° or 25°, depending on the manufacturer of the system or the size and type of aircraft.
Rate-Based System: The rate-based autopilot system uses rate gyros and / or accelerometers as primary sensors.
Rate Gyro Sensors. Many Cobham autopilots are rate-based systems. Their rate gyro is an all-electric turn coordinator. Ordinary aviation rate gyros have detected motions as low as 1/16000°/sec. Because of this sensitivity, rate sensors have been used to derive attitude synthetically, which, in turn, drives autopilots as well as attitude instruments.
The Accelerometer Sensor. This sensor gives
the autopilot more authority, which improves performance. The accelerometer measures second-order rate accuration. Vertical acceleration detects vertical motions and rates of pitch attitude change. It can be a direct, sensitive indicator of any attitude change and a means to control high G forces. During normal operation, vertical acceleration can limit pitch maneuvering. During abnormal operation, it can limit pitch excursions.
Advantages of Rate-Based Systems: In General Aviation singles, light twins and turboprops, rate systems offer significant advantages over position-based autopilots.
Safety. A rate gyro won’t tumble in an unusual attitude. Pilots are instructed to use the turn- and-bank or turn coordinator instrument to level the wings during recoveries. The safety factor is increased by the reliability of the system. In a light General Aviation (GA) airplane, two of the least reliable systems are the vacuum system and the attitude gyro. The electric turn coordinator rate gyro and the autopilot do not depend
on either. If the vacuum system or attitude gyro fails or experiences degraded performance, the turn coordinator and the autopilot will continue to fly the airplane.
 Responsiveness. This is the primary advantage of a position-based system. Attitude information is more advantageous for rapid recovery from in-flight upsets. Most attitude-based autopilots are more responsive than rate-based systems because they can correct the position-error input more rapidly with less course/heading error during correction. The roll signal isn’t influenced by yaw angle or rate. When the yaw angle and rate are combined, as they are in most turn coordinator based rate systems, they could diminish the effect of roll.
Responsiveness. This is the primary advantage of a position-based system. Attitude information is more advantageous for rapid recovery from in-flight upsets. Most attitude-based autopilots are more responsive than rate-based systems because they can correct the position-error input more rapidly with less course/heading error during correction. The roll signal isn’t influenced by yaw angle or rate. When the yaw angle and rate are combined, as they are in most turn coordinator based rate systems, they could diminish the effect of roll.
Reliability Failure Rate. Rate gyros are inherently more reliable than attitude gyros. A Cobham
autopilot turn coordinator rotor spins at approximately 1/3 the speed of the rotor in an attitude gyro. This means a longer Mean Time Between Failures (MTBF)—over 8000 hours. A Cobham accelerometer has an MTBF of more
than 20,000 hours. The failure rate for the typical attitude gyros is far more frequent. Reliability is not always measured by a total failure. Gyros often experience performance degradation over a period of time due to bearing wear. In a position or attitude gyro, bearing wear causes precession, which is reflected in the
performance of a position-based autopilot. Rate gyros with worn bearings continue to function at a high level of performance until the spin motor fails.
Performance-Rate. These gyros function in any attitude because they don’t tumble. They aren’t damaged or worn excessively by unusual attitudes. Also, since a consistent turn rate requires a lower bank angle at lower airspeeds, rate autopilots often provide more precise aircraft turn control at low airspeed. For example:
At 200 m.p.h., a standard rate turn (3°/sec) requires approximately at 25° bank, typical of most autopilot systems. However, at 90 m.p.h., a standard rate turn requires only 13°-14° bank. Since the turn rate is always the same, the performance of the system rolling into and out of turns is consistent. There is little tendency to overshoot and over control at low speeds.
Features and Functions of an Autopilot
Position-based and rate-based autopilot systems can have the same features and functions. The difference lies in how they execute them. A dramatic example is how each system handles turbulence. Position-based autopilots are extremely responsive. Many of their Pilot Operating Handbooks (POHs) instruct the pilot to disconnect in turbulence to prevent over-stressing the airframe.
A Cobham rate-based autopilot, sensing 0.6Gs or greater, will disengage momentarily to prevent overstressing the airframe. The Cobham POH does not dictate disconnecting in light to moderate turbulence. However, the pilot is always in charge. Pilots are strongly encouraged to monitor aircraft and autopilot performance in any degree of turbulence and take the necessary measures to maintain safety.
Roll Functions
 Wing Stabilizer (Wing Leveler). In the stabilizer mode, the autopilot holds the wings level, and the pilot can make right or left turns. This is the most basic function that the autopilot performs to relieve pilot workload.
Wing Stabilizer (Wing Leveler). In the stabilizer mode, the autopilot holds the wings level, and the pilot can make right or left turns. This is the most basic function that the autopilot performs to relieve pilot workload.
Heading Mode. When in the heading mode, the autopilot holds a heading and / or executes a turn to a selected
heading. The autopilot maintains more precise control over the aircraft than a wing stabilizer. NOTE: The heading mode is operational only if the aircraft is equipped with an optional heading system, such as a Directional Gyro (DG) with a heading bug or a Horizontal Situation Indicator (HSI).
Course Tracking and Coupling. A tracking autopilot must be placed on the desired navigational course as it will not perform an intercept. The pilot can place the aircraft on the desired course by hand flying the aircraft or by using the heading bug. Any changes in the desired course will require the pilot to establish the aircraft on the new desired course by again hand flying the aircraft or using the heading bug. Coupling, on the other hand, enables the autopilot to intercept, couple and fly Very High Frequency Omni Directional Range (VOR), Area Navigation (RNAV), Long Range Navigation (LORAN), Global Positioning System (GPS) or Localizer (LOC) or Reverse (REV) for back course signals. Cobham autopilots with couplers have three automatic gain levels for aggressive approach coupling and smooth enroute tracking.
Course Deviation Warning. As its name reflects, the warning alerts the pilot that there is significant deviation in the course tracking. This feature proves extremely valuable when the pilot’s attention is divided during high activity flight phases.
Dual Mode Intercept. The intercept feature allows the pilot to select the intercept angle for coupling. The pilot can then follow an Air Traffic Controller’s (ATC) instruction, “Fly heading 060° until intercepting the localizer, then cleared for the approach.” The autopilot flies the assigned heading in the heading mode. Then it automatically intercepts and tracks the selected navigation signal (NAV or APR).
Roll Steering. Roll Steering integrates the autopilot with a GPS Navigator that outputs roll steering commands. Rather than following a CDI needle movement, it flies the roll steering commands direct from the GPS Navigator output signal.
Pitch Functions
Altitude Hold. When the aircraft reaches the desired altitude, the pilot has the option to engage the altitude (ALT) hold mode to maintain that altitude. With some Cobham autopilots, altitude may be trimmed in 20-feet increments to compensate for barometric pressure changes enroute.
Vertical Speed. The vertical speed (VS) command allows the pilot to command and hold a rate of climb or descent.
Pre-Selected Altitude Capture. Altitude pre-select requires an optional Altitude Selector/Alerter and is accomplished using the dual mode function of VS (Vertical Speed) and ALT (Altitude) hold.
Glideslope Coupling. The autopilot will intercept and track the glideslope (GS) of an Instrument Landing System (ILS) Lateral Precision with Vertical Guidance (LPV), or Vertical Navigation (VNAV) in approach APR mode.
Trim. When the aircraft’s elevator is out of trim, some pitch-axis autopilots will annunciate the condition. Many systems are equipped with manual electric trim for the pilot to use control wheel mounted switches to trim the airplane and/or automatic electric trim for the autopilot to trim the airplane.
Control Wheel Steering. The pilot can hand-fly the aircraft without disengaging the autopilot. The pilot can then synchronize the autopilot to the current attitude by releasing the wheel-mounted control switch.
Yaw Functions. Yaw dampers are often an optional add-on to an autopilot system. For Beech V-Tail Bonanzas and other aircraft that have high yaw rates, yaw dampers can be added as a stand-alone system. Many newer autopilot systems come with the yaw damper as a standard feature of the autopilot
Pilot Workload
Common Cockpit Tasks
As you know, flying an aircraft demands fulltime attention to every detail. Even for the most experienced pilot, flying can be very stressful. An autopilot is a useful and sometimes necessary resource even when a pilot prefers to hand fly. It can reduce workload, enhance safety and increase the enjoyment of flying. Most flights require the pilot to perform several duties at once. An autopilot can take over some of the functions so that the pilot can attend to other tasks.
Maintaining Assigned Altitude and Heading. One of the most critical tasks is to hold a prescribed altitude and a heading. Without an autopilot, the pilot must keep one hand on the controls while checking charts, tuning radios and communicating with ATC. A basic autopilot that controls roll and pitch can serve as a virtual copilot.
Navigation. Autopilots are capable of:
• Holding a heading
• Tracking a VOR, GPS, LORAN or LOC signal
• Intercepting the course
All the pilot has to do is tune in the signal frequency, dial in the course and engage the desired autopilot mode. If the autopilot has a tracker, the pilot has to put the airplane on course before engaging the tracker.
Global Positioning System Steering (GPSS) GPSS is a recent technological advancement that has made navigating an aircraft even easier. With a GPS unit that outputs ARINC 429 roll steering commands and data, pilots can preprogram their flight plan in the GPS unit. Once in flight, the autopilot is activated and the GPSS roll steering function is chosen, the autopilot will fly the entire flight plan. It will anticipate leg changes and make the correct turn to fly from centerline to centerline. This benefit results in a dramatic reduction of pilot workload and a smoother flight for passengers.
Approaches. Flying an approach can be easier with an autopilot. It simplifies the intercept calculations
and ensures a successful glideslope capture. An autopilot will also relieve the workload while the pilot follows a controller’s instructions. And with a GPS system to output roll steering commands, an autopilot with GPSS capability will fly a GPS approach from the system’s data bases.
Summary
With an autopilot, the pilot retains command by choosing how much of the flight to hand fly. The pilot can then attend to other important duties knowing that the flight is under reliable, second in-command control.
Safety
Autopilots make a major contribution to increased safety for pilot and passengers alike. All pilots can identify with challenging situations. But those who have experienced a tense condition can more fully appreciate the need to have an extra pair of hands. An autopilot is not designed to substitute for the pilot in tough situations. Pilots should never rely totally on the autopilot. An autopilot is simply a resource management tool for the pilot.
Threatening Weather. If a pilot is flying Visual Flight Rules (VFR) and sees threatening weather in the flight path, he or she must quickly assess the situation, locate charts, check fuel availability, evaluate alternatives and make critical decisions. The autopilot can control the aircraft while the pilot attends to other duties.
Disorientation. The possibility of a pilot becoming spatially disoriented always exists. It could happen in a storm, during night flying or any time the horizon is obscured. An autopilot is a tremendous help in this situation. Engaging the autopilot will stabilize the aircraft.
Other Difficult Situations.
A vacuum system failure or the loss of the attitude horizon challenge a pilot. In light GA aircraft, these are the two least reliable systems. All electric autopilots like Cobham’s are only slightly affected by these failures and can even execute a fully coupled ILS approach. If a vacuum directional gyro is used for heading, the only impact is the loss of the heading system; NAV or APR modes are still available.
Something Old, Something New
It is a well-known fact that the aircraft fleet in the United States consists mostly of older aircraft. The average age of the fleet is 34 years. Many of these older aircraft still have the same avionics. With autopilots, the principle of operation remains as it was some 30 years ago; i.e., position-based or rate-based. Today, however, with the rapid advances of technology, the newer autopilots offer more features and functions and greatly improved performance.
The Older Systems.
The early autopilots did not use rate of change to condition their response. When commanded to bank, they input a servo drive proportional to the command, then took it out when the aircraft reached the commanded angle. The result of this aggressive control was a rather unpleasant ride.
Maintenance. As autopilot systems gets older, parts not only become scarce, they get more expensive. Prices
increase for spare parts. Lack of available parts make repairs more difficult or so costly that the expense is simply not justifiable.
Functionality. Many of the older systems don’t offer the sophisticated features and performance that the newer systems do.
The Newer Systems
The newer autopilots incorporate advanced technologies that result in:
• Better performance
• Greater reliability
• Increased functionality
• Lower repair costs
New Technology
Altitude Hold. The solid-state pressure transducer of a modern autopilot can measure the pressure environment outside the aircraft in flight. This provides instantaneous altitude data. The transducer is accurate to two or three feet, ten times the accuracy of the older device. As the temperature and altitude change, the transducer provides continuous data, which is then used to provide altitude hold and vertical speed command functions.Vertical Speed Command. This allows pilots to establish a rate of descent or climb through the autopilot. Vertical speed and vertical acceleration data are provided to the autopilot’s computer by the pressure transducer and an accelerometer.
GPSS Roll Steering. The GPSS Roll Steering device uses signals from GPS systems to steer the aircraft. (Please refer to Features/Functions Section on tabs above.) Although the roll steering function has been in aircraft with Inertial Navigation Systems since the 1960’s, it has only recently been made available for light general aviation aircraft with the advent of GPS.
Use of Derived Rate
During the late 1960’s, autopilot manufacturers began to use derived rate in their systems. This resulted in better control of the autopilot’s responses in controlling the aircraft.• Execution of commands became less abrupt
• The autopilot no longer caused a control motion
Rather, it controlled the rate at which the motion was started or stopped. Today, aircraft fly with either position-based systems using derived rate, or true-rate systems like a Cobham autopilot that derive all their information from directly-measured rate.
Improving Efficiency and Lowering Trip Costs. Today’s autopilots maximize flight efficiency. For example, they take advantage of the winds in varying conditions and flight profiles:
Climbing. When climbing into a headwind, it could be advantageous to climb at the maximum climbing rate until you achieve cruising altitude. This would reduce the time spent at low speed in the headwind and maximize the time spent in higher speed cruising flight. Conversely, climbing with a tailwind could be performed at a low cruise climbing rate. Then you could take full advantage of being in the favorable wind at a higher forward speed. With a vertical speed mode, your autopilot can hold those climb rates more easily and with more precision and consistency.
Descending. Descents at low rates over long periods in tailwind conditions are more efficient and enjoyable with an autopilot that has an accurate vertical speed mode. Descent rates as low as 100 feet per minute will often yield an 8-12 knot increase in Indicated Airspeed. From altitudes of 8-to 10-thousand feet, low rate descents can be spread out as long as an hour. This is the equivalent of cutting 12 to 20 nm off the flight—FREE! Without an autopilot with the vertical speed mode, these long, slow descents are almost impossible.
Checking For Better Winds. An autopilot can also help maximize enroute efficiency by giving the pilot time to check enroute weather and winds aloft, and execute changes to the route and altitude to locate better winds.
Calculating Accurate Fuel Consumption. When using precisely controlled rates of climb and descent, you can calculate accurate fuel consumption. This is most helpful when you’ve experienced a number of route changes because of weather or ATC, and the fuel reserve at your destination is in question.
Introduction
Purchasing An Autopilot
Now for the perfectly reasonable question: Why should you invest in an autopilot when you have so many options? You could buy a new GPS, a weather avoidance system or an Multifunction Display (MFD). Or you could get a new paint job
and interior.
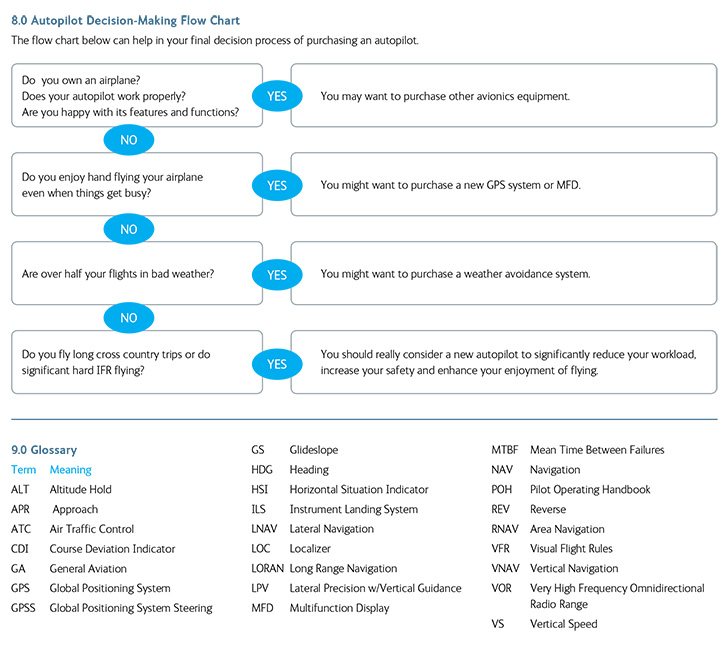
If your current autopilot works properly and you’re satisfied with its features and functions, the practical answer is: spend your money elsewhere. An MFD, for example, could reduce your workload even further.
If you don’t own an autopilot, consider the workload reduction that adding an autopilot to your panel will provide you. Maybe your current system doesn’t work properly, serves only the roll axis, or you want to reduce your work load even more. Consider an autopilot with updated features and functions, such as vertical speed command and GPS Steering. Whatever your decision, base it on pilot workload and safety.
Considerations
Q. Which instrument upgrade or avionics upgrade would benefit you most?A. Compare another piece of equipment with the benefits of an autopilot:
• An autopilot flies the aircraft for you. The newer GPS and MFD’s will help you navigate, but you still must fly the aircraft.
• An autopilot can help you in a difficult situation; i.e., instrument failure or inadvertent weather encounter.
• An autopilot reduces your workload more significantly than GPS or MFD’s.
• The autopilot not only flies the aircraft for you, it also has the capabilities to navigate from a VOR, LORAN, or LOC signal, or even from your existing GPS unit.
Q. If you make 100 flights a year, how many times will you use an autopilot?
A. Experience indicates you will want to use it on every trip.
Q. During those same 100 fights, how many times would you need to use a weather avoidance system?
A. On most flights, you will have good weather. However, if you fly your aircraft in poor weather conditions routinely, you probably need both an autopilot and a weather avoidance system.
Your aircraft is a major investment. Before you make any purchase, decide what will be the most beneficial addition to the performance and safe operation of your aircraft in the long run.
Auto Pilot Flowchart and Glossary of Terms